DBot
Intro
DBota jsem postavil jako svého třetího robota. Jeho primárním účelem je účast na Robotickém Dni 2012 v kategorii Line Follower.
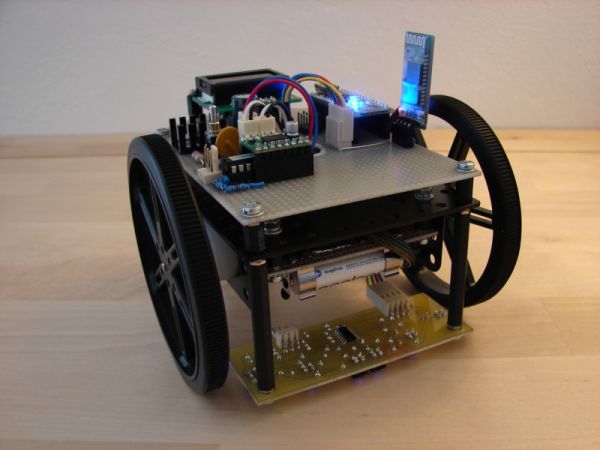
Je postaven na diferenciálním podvozku s jedním opěrným bodem, který tvoří kulička. Konstrukce podvozku vychází z Robrouka a jednotlivé "vrstvy" jsou spojeny distančními sloupky M3. Pohon zajišťují dva motory GM7. Napájení dodává šest sériově zapojených NiMh článku AAA o kapacitě 800 mAh. Stabilizaci napájení pro logické obvody obstarává obvod L4940 doplněný malým chladičem.
Palubním počítačem je Arduino Nano 3.0, které je osazeno procesorem ATmega328 na 16 MHz. Ovládání motorů zajišťuje dvojitý h-můstek od firmy Pololu osazený čipem TB6612FNG. O generování PWM a řízení směru se stará PICAXE 14M2 na 4 MHz. Ten je z Arduina ovládán přes sériovou linku komunikující rychlostí 9600bps. Ovládání motorů zajišťuje modul Sarbetooth 2x5, který je ovládán z Arduina prostřednictvím sériové linky komunikující rychlostí 9600bps.
Čtení čáry je realizováno modulem z produkce firmy LanBot. Tento modul obsahuje šest čidel QRD1114. Ty jsou připojeny na ADC vstupy procesoru PICAXE 14M2. Napájení čidel je navíc odpojitelné, což lze využít například pro jejich kalibraci. Modul disponuje programovací konektorem a s okolím komunikuje prostřednictvím sériové linky. V mém případě používám rychlost 9600 57600bps. Z popisu je zřejmé, že modul respektive jeho procesor by byl schopen celého robota i řídit. Arduino je doplněno o textový displej umožňující zobrazit 8x2 znaků a tlačítko pro komunikaci s obsluhou. Komunikace s robotem je možná přes USB a také Bluetooth. Ten je odnímatelný, aby robot splňoval podmínky výše zmíněné soutěže.
22.4.2012
Nepodařilo se mi napsat program pro PICAXE ovládajícího motory dostatečně robustně. DBot občas dostával "záhadné křeče". Času je málo a proto jsem sáhl po osvědčeném modulu Sarbetooth 2x5.
23.4.2012
DBot je plně funkční. Sice to není žádný rychlík ale alespoň je schopen sledovat celou dráhu a to i několikrát po sobě :-).
26.4.2012
Vzal jsem DBota ukázat do RoboDoupěte. Místo slov bezmezného obdivu byla jeho funkce zkritizována ;-) Vzal jsem si obdržené rady k srdci a hned na místě ho trochu přestavěl a přepsal program. Výsledkem je, že robot funguje o dost lépe. Všem zainteresovaným jsem pochopitelně zavázán :-).
28.4.2012
DBot skončil na 11. místě s časem 31,5 sekundy. V konkurenci 24 robotů to není tak zlé každopádně už vím, že příště na to musím jít jinak.
1.5.2012
Prozatím jediné video na kterém je DBot vidět v akci. Je to točené telefonem takže kvalita tomu odpovídá ale díky bohu za něj!