DoDa
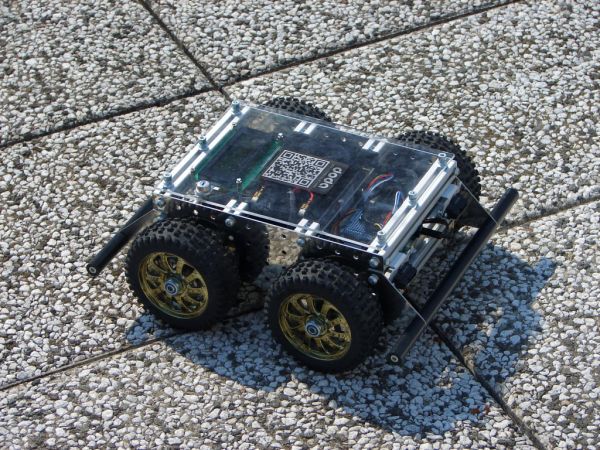
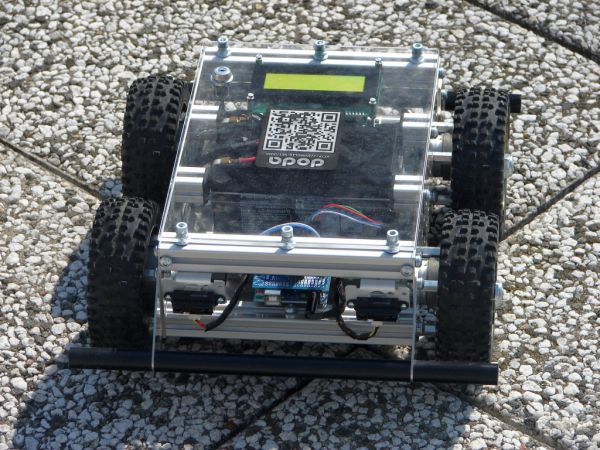
Dovolte mi představit vám experimentální robotickou platformu doda.
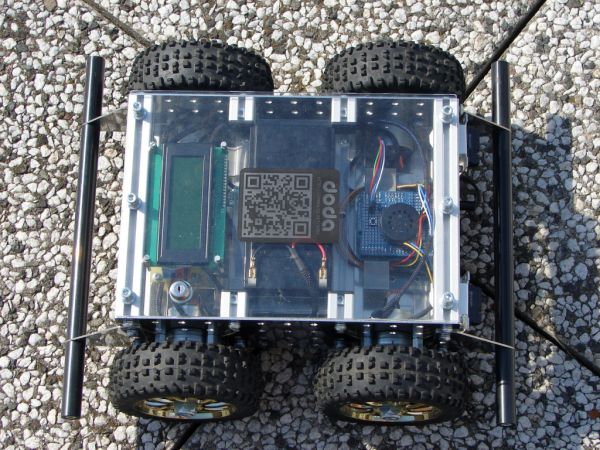
V součastnosti (25.4.2011) je základem podvozek MOB-03, který byl na zakázku mírně modifikován. Modifikace spočívá ve zvětšení šířky z obvyklých 160 mm na 180 mm. Hlavním důvodem k rozšíření bylo umožnit v budoucnu instalaci Mini-ITX desky. V neposlední řadě je díky tomu možné vybavit podvozek silnější baterií.
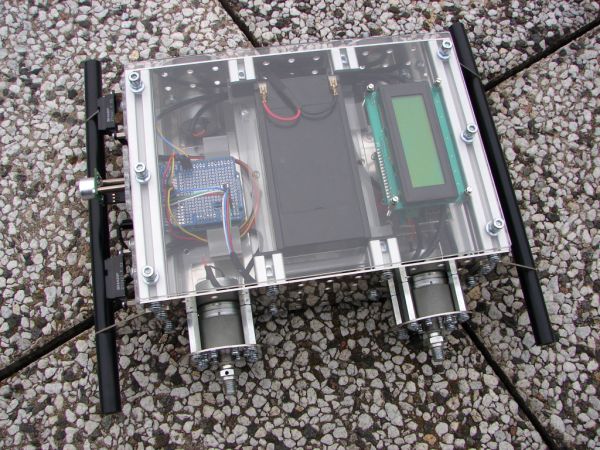
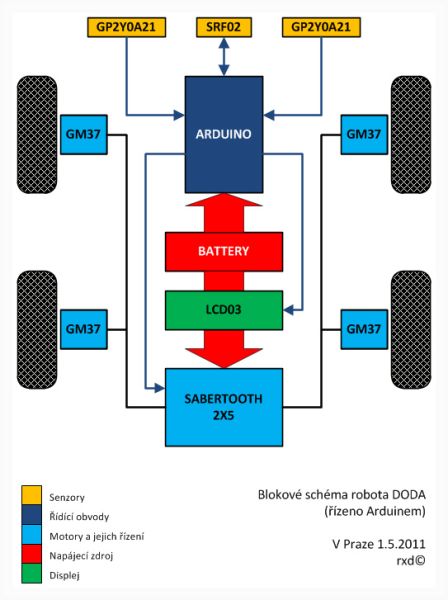
O řízení se aktuálně stará Arduino Duemilanove. Veškerý software je napsán v jazyce Wiring.
Podvozek je vybaven čtyřmi motory GM37-110, které jsou napájeny 12 V Pb baterií Panasonic s kapacitou 3,4 Ah. Motory jsou řízeny modulem Sabertooth 2X5, který je s Arduinem propojen sériovou linkou v 5 V TTL urovních.
Orientaci v prostoru zajišťují dva infračervené dálkoměry Sharp GP2Y0A21 a jeden ultrazvukový dálkoměr SRF02.
Robot je doplněn o displej LCD03, který usnadňuje komunikaci s obsluhou.