MumoBot
Konstrukce
Základem je malosériově vyráběný podvozek MOB-02, který byl na zakázku částečně modifikován. Výška těla podvozku vzrostla na 240 mm. Pasivní opěrné kolo bylo zvětšeno a jeho uchycení bylo taktéž upraveno. Tato modifikace ještě není úplně dokončena, ale stávající stav nebrání provozu.
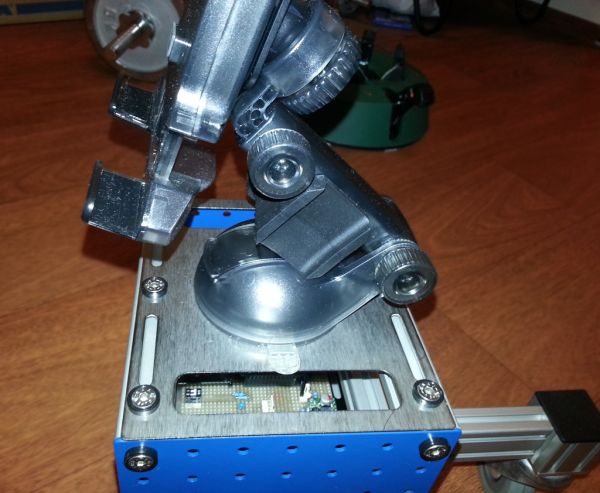
Vrchní a spodní vodorovné krycí plochy jsou vyrobeny z kartáčovaného nerezu pro větší odolnost. Zároveň je vrchní plocha navržena pro uchycení přísavky držáku na tablet. Aktuálně je využit držák iOttie Easy Smart Tap 2, který je vybaven nastavitelným teleskopickým ramenem a kloubem s fixací, umožňující natočení o 360 stupňů.
Pohon obstarávají dva motory GM37 vybavené vlastní převodovkou. Napájení zajišťují dva 12 V gelové akumulátory o celkové kapacitě 2,6 Ah. Akumulátory jsou zapojeny paralelně a jsou umístěny v dolní části robota.
Uchycený tablet, krom přínosu v podobě čidel a kamer v něm obsažených představuje běhové prostředí pro "umělou inteligenci" robota, která je postavena na Platformě Android 4. O základní řízení se stará prototypová deska osazená Arduinem Nano 3.0 s ATmega328 na 16 MHz, která přijímá rozkazy od AI tabletu. Komunikace s nadřízeným systémem probíhá buď po USB emulující sériový port nebo prostřednictvím bluetooth modulu HC-05. Řízení motorů je realizováno modulem Bridge2x2A, ovládaným sériovou linkou z Arduina. Robot bude v budoucnu doplněn o nárazníky, ultrazvukové dálkoměry, osvětlení pomocí NeoPixels a další součásti.